|
Raspberry Pi 44) Ovládání serva Servo se používá pro natočení nějaké mechanické části
na přesně zadaný úhel. Pro pokusy jsem použil levné modelářské servo s
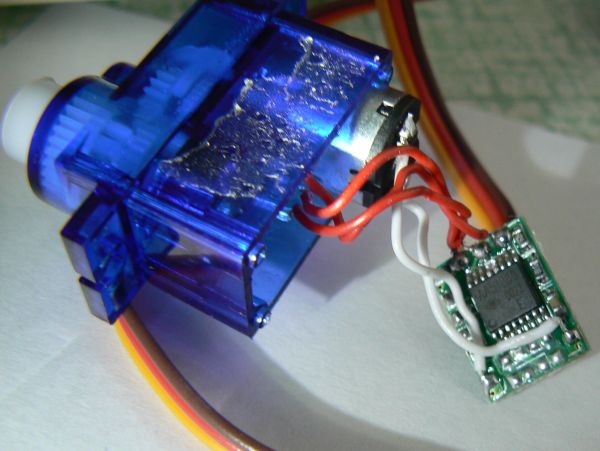
označením 9g. Hlavní částí tohoto serva je stejnosměrný
elektromotor s převodovkou a řídící elektronikou. Přímo k ose serva
je přidělaný potenciometr, který slouží jako zpětná vazba pro
elektroniku. O vlastní řízení se stará obvod s označením AA51880. Princip řízení je následující: Po připojení napájecího napětí (hnědý vodič=GND; rudý vodič=+5V) se do zbývajícího vodiče (oranžový) posílají frekvencí 50 až 100Hz obdélníkové impulzy. Podle šířky těchto impulzů se osa serva natočí do patřičné polohy. Pracovní rozsah natočení je 180° (servo ale zvládá i trochu větší úhel na každou stranu). Při šířce impulzu 0,5ms se servo natočí do jedné krajní polohy, při šířce impulzu 2,5ms se osa přetočí o 180° - do druhé krajní polohy. Když je šířka impulzů 1,5ms, natočí se servo do střední polohy. Na frekvenci impulzů moc nezáleží. Důležitá je hlavně šířka pulzu. Při nízkých frekvencích se ale servo už pohybuje trhaně. Připojení k RasPi Modelářské servo pracuje s napětím mezi 3V a 5V.Změřil jsem, že odběr jednoho serva je krátkodobě (když se pohybuje) až 200mA. Pokud máte novější variantu RasPi (s 512MB paměti) a silný napájecí zdroj, můžete připojit napájení serva na +5V na GPIO konektoru. Bezpečnější je ale použít zvláštní zdroj. Mám vyzkoušeno (viz video níže), že přes 5V pin na GPIO konektoru je možné napájet 2 serva zároveň. Je to ale opravdu na hranici: 550mA samotné RasPi + (2 x 200mA) serva = 950mA. Vstupní pojistka v RasPi je 1100mA. Takže je tam rezerva nějakých slabých 150mA. I když je servo napájené z 5V, je možné ho bez problémů řídit 3,3V impulzy, které jsou generované nějakým GPIO pinem. Ovládání - varianta 1 (GPIO - PWM) První způsob řízení, na který jsem pomyslel, bylo využití zabudované PWM funkce GPIO výstupů. Schéma: (Pro pokusy jsem používal 2 serva na sobě, která byla otočená
o 90° - jedno jako horizontální a druhé jako vertikální ): Popis: Na GPIO výstupu se nastaví frekvence 50Hz a střída se přepočte tak, aby při krajních polohách byla délka trvání impulzu 0,5 a 2,5ms. Pomocí trojčlenky jsem došel k následujícímu: Při 50Hz trvá celá perioda signálu 20ms. Vzhledem k tomu, že je možné zadávat střídu jen v celých procentech, Bylo by pro výběr polohy možné využít jen celá čísla od 3 do 13 To je jen 11 pozic. Na ovládání stylem "Zavřeno" / "Otevřeno" to stačí, ale pokud by bylo třeba najíždět do mezipoloh, tak je to dost málo. Zkusil jsem tedy změnit výpočet pro vyšší frekvenci (100Hz). To už je trochu lepší přesnost - celý rozsah 180° se tímto rozdělí na 20 pozic. Problém ale nastal se stabilitou. PWM na GPIO, které je řízené Pythonem je dost nestabilní, a proto i při dojezdu do požadované polohy servo strašně zakmitávalo (nedokázalo se rozhodnout, jestli už je ve správné poloze), takže tento způsob by byl v praxi nepoužitelný. Program: servo-gpio-pwm.py Video: servo-gpio-pwm.avi ( na videu je vidět to zakmitávání při najíždění
do cílové polohy
Ovládání - varianta 2 (ServoBlaster) Druhý způsob řízení využívá modul ServoBlaster. Nejdříve bylo nutné ten modul ServoBlaster nainstalovat. Přes terminál jsem nainstaloval "git"
Pak jsem zkopíroval soubory PiBits z GitHubu do adresáře /home/
Další operace jsem pak nechal vykonat vlastním pythonovským skriptem, který je součástí ovládacího programu pro serva: Jde o to, že se pomocí shellovského příkazu insmod
musí nejdřív nainstalovat modul servoblaster. Po instalaci se mu automaticky přiřadí
nějaké pořadové číslo. Pak se pomocí příkazu mknod vytvoří, za použití toho pořadového čísla, v adresáři /dev/ zařízení "servoblaster" Tady je část pythonovského programu, která kontroluje, jestli už
je servoblaster nainstalovaný. Při vypnutí RasPi se modul servoblaster automaticky odinstalovává, proto je třeba kontrolovat stav nainstalování při každém spuštění programu.
Program: servo-blaster.py Video: servoblaster1.avi ( tady je už vidět stabilní najíždění do cílové
polohy
Ovládání - varianta 3 (obvod PCA9685 - PWM driver ovládaný přes I2C) V poslední variantě jsem využil externí obvod PCA9685, který je možné pomocí I2C komunikace nastavit tak, aby generoval na výstupech obdélníkový signál s přesně danou šířkou pulzů. Protože je obvod po nastavení úplně nezávislý na RasPi, je generovaný signál velice stabilní. Další výhodou tohoto způsobu řízení je možnost
velice jemně nastavit šířku pulzů. Řízení serva podobným způsobem je vysvětleno například na těchto stránkách: http://learn.adafruit.com/.....
Schéma:
Program: servo-pca.py Video: servo-pca.avi (
|




{kind=link}