|
Raspberry Pi 48) Připojení jednojehličkové tiskárny BT-100 k Raspberry Pi
Při vyklízení půdy z bývalého Svazarmu, jsem objevil jednu
velice starou jednojehličkovou tiskárnu. Protože má velice jednoduché ovládání, zkusil jsem jí připojit k RasPi. Nakonec se mi podařilo tiskárnu rozchodit, ale vzhledem
k rychlosti, hlučnosti a kvalitě tisku je v dnešní době nepoužitelná.
1) Popis tiskárny Detailní popis tiskárny naleznete tady: http://www.root.cz/clanky/periferni-zarizeni-osmibitovych-pocitacu-vyrabena-v-cssr/#k05 Základem jsou dva obyčejné stejnosměrné motory. Další optočidlo se nachází na jednom z okrajů dráhy vozíku. Když k němu vozík dojede, paprsek se přeruší a počítač dostane signál, že se tisková hlava nachází ve výchozí pozici. Tisk jednotlivých bodů se provádí jehličkou, která je ovládaná elektromagnetem. Tiskárna nemá žádnou barvící pásku, jak bylo obvyklé u později vyráběných jehličkových tiskáren. K tomu, aby dokázala jehlička zanechat na papíře černou tečku, muselo se s ní klepat přes kopírák, nebo přes speciální samokopírovací papír. Schéma vnitřního zapojení je zde: http://falconsoft.czechian.net/bt100/images/SchemaBT-100.gif
2) Interface Tiskárna odesílá do počítače signály s TTL napěťovými
úrovněmi (5V). Přivedení těchto napětí přímo do RasPi by bylo zničující.
Je tedy třeba tato napětí snížit. K tomu jsem použil obyčejné děliče
napětí složené z odporů 1k a 1k8. Tím by se mělo výstupní napětí
z tiskárny snížit na maximálně 3,3V. Na hodnotách odporů zas až
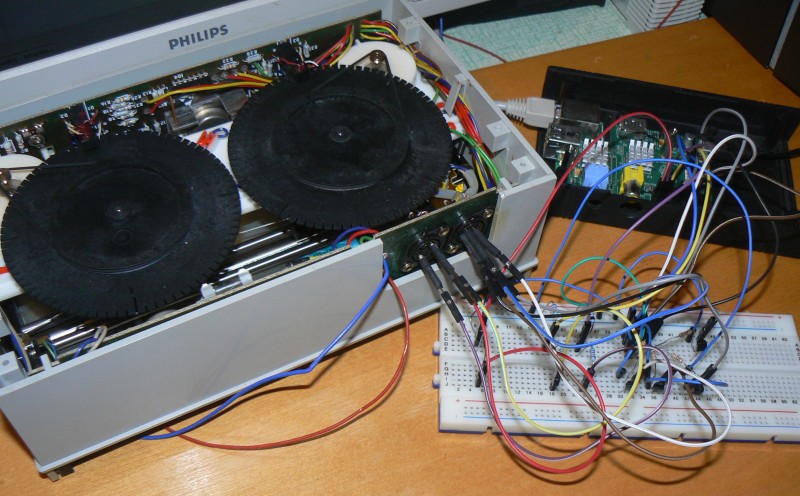
tolik nezáleží. Dělící poměr nesmí být větší, než 2:3. Ovládání motorů a jehličky se provádí přivedením "0" na ovládací vstup. Pro jistotu jsem ke spínání použil obyčejné NPN tranzistory (2N5551). Trochu problém jsem měl s napájením. Tiskárna potřebuje docela silný zdroj 22V. Ale i ten jsem nakonec sehnal. Vytvořil jsem si tedy takovýto "interfejs" mezi tiskárnu a RasPi:
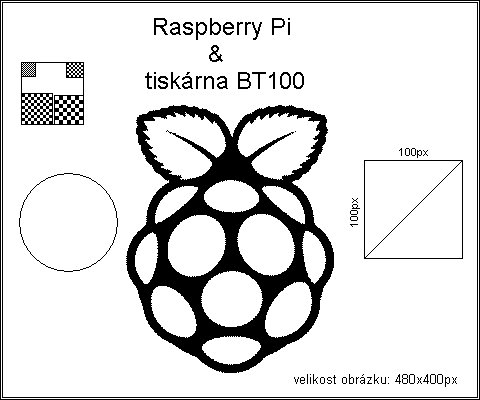
3) Software Program jsem zkusil napsat v Pythonu. Jak se ale ukázalo nejen tady, ale i v minulých pokusech, tento jazyk není vhodný na rychlé testování GPIO vstupů. Komentovaný program s ukázkovým příkladem použití je tady: bt100.py Program umí tisknout obrázek, který je uložen v souboru - v černobílém
rastrovém obrázku s šířkou 480 bodů (výška je libovolná). Do programu by bylo možné přidat ještě nějakou
"inteligenci", která by trochu urychlila tisk.
4) Výsledek
Neočekával jsem od tiskárny žádné zázraky. Rychlost tisku ale byla
opravdu velice malá.
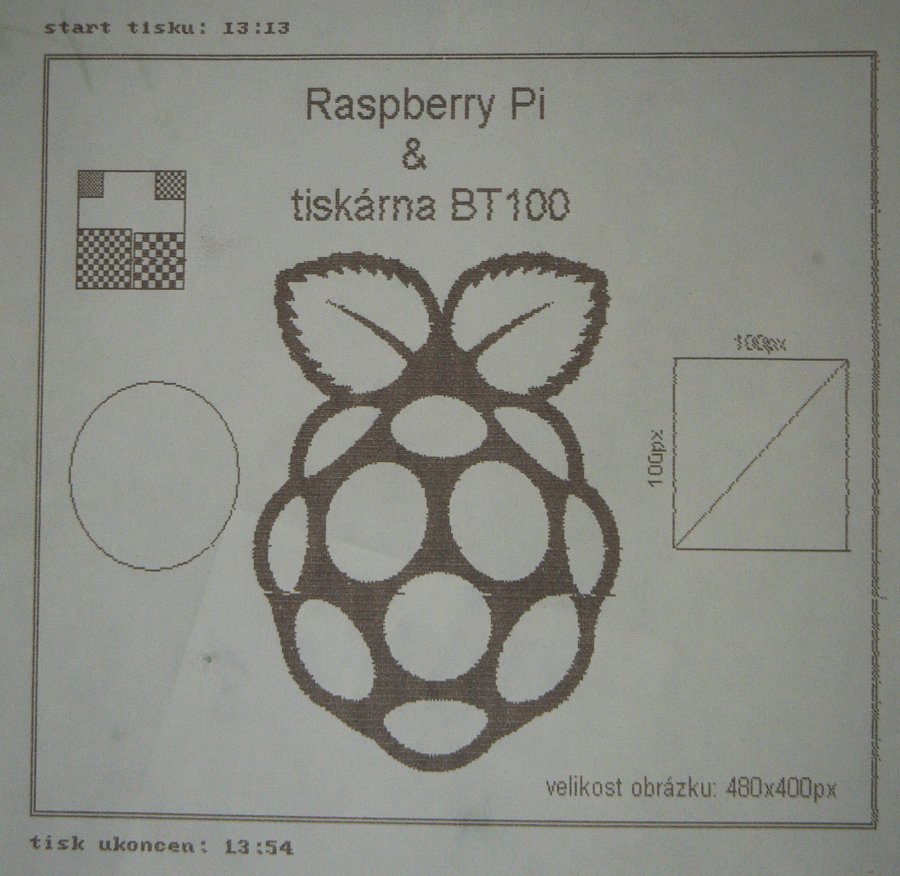
Fotografie výsledného dokumentu: Rozlišení vypadá takto:
Ani kvalita nebyla dobrá. Na výsledné fotografii vytisknutého obrázku je vidět, že pravý okraj není rovný. Je to způsobeno tím, že ovládací program občas nesprávně vyhodnotil přerušení světelného paprsku u optočidla, které sleduje posun vozíku. Čím dále se vozík nachází od své nulové polohy (od levého okraje),
tím těch chyb přibývá.
5) Ukázkové video Na videu je vidět vnitřek tiskárny s drážkovanými koly. Pokud máte zapnutý zvuk, uslyšíte i typické bzučení jehly při
tisku. Také si můžete všimnout setrvačnosti kola při posunu papíru. Čidlo
posunu papíru je nastaveno na 4 hlubší výřezy. Když některým z těchto
čtyř výřezů prosvitne paprsek, program zastaví motor.
|




{kind=link}