| Při astronomických pozorováních se na svícení používá červené světlo. Důvody jsou popsány
třeba zde. Při rozkládání a balení dalekohledu je ale třeba trochu víc světla a tak je pro tyto činnosti vhodnější jasnější bílé světlo. Já jsem si původně vytvořil jednoduchou čelovku, kde jsem obyčejným 3-polohovým přepínačem přepínal červenou nebo bílou sadu LED. V prostřední poloze byla čelovka zhasnutá. Neměla žádnou možnost regulace jasu.
Když jsem se naučil programovat mikrokontrolery ATtiny, napadlo mně, že bych si mohl čelovku trochu vylepšit. Pokud si takovou čelovku chcete postavit, přináším vám návod.
Video s ukázkou činnosti na YouTube
Funkce
V normálním režimu je odběr z baterie při zhasnutých LED asi
4 až 7mA (v závislosti na napájecím napětí).
- Funkce BLIKAČ
Nepovedená SMD verze s krytkou
SMD LED vyzařují velice příjemné rovnoměrné všesměrové světlo, takže se při něm čte daleko lépe, než při použití obyčejných LED, jejichž světlo tvoří ostře ohraničený kužel. Problém byl ale právě v tom všesměrovém záření.
Aby čelovka neoslňovala pozorovatele v okolí, bylo nutné vyrobit
krytku, která omezila vyzařování světla do stran. Z toho důvodu jsem už dále s SMD variantou nepokračoval. Krytka byl můj první 3D projekt. Vytvářel jsem jí v programu Autodesk-123D Design a 3D tisk jsem nechal dělat u Dirty Boards. Data: kryt_led.123dx
Měření jasu LED a proudového odběru
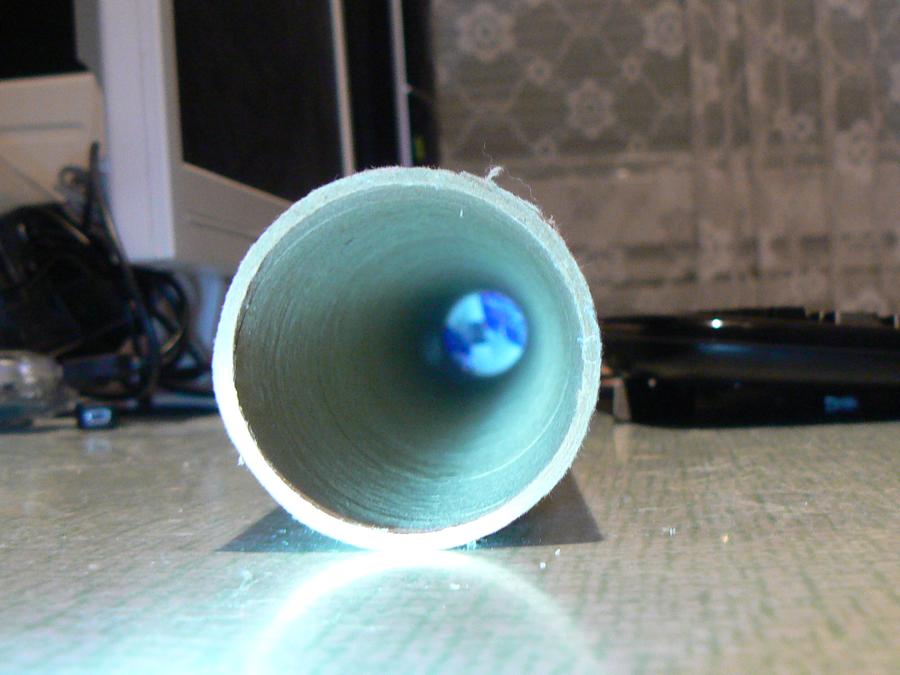
Pro měření světelného výkonu jsem použil čidlo
BH1750, které jsem připojil k Raspberry Pi.
Čidlo bylo umístěno na dně 65cm
dlouhé trubky. Program pro měření jasu byl upraven tak, že zaznamenával nejvyšší dosaženou hodnotu (merjas.py). Testování probíhalo při třech úrovních napájecího napětí: 3V, 4V a 5V při všech úrovních nastaveného jasu (0 až 10). Toto měření bylo prováděno s odpory 47R v sérii s bloky LED diod. Pro doplnění měření byla následně provedena výměna
sériových odporů u LED. Na takto upravených deskách bylo provedeno měření
jen pro napájecí napětí 3V a 5V.
Na základě naměřených hodnot jsem zjistil, že varianta čelovky s SMD LED má při stejném světelném výkonu několikanásobně větší proudovou spotřebu. Pro příklad (příklady jsou v tabulce označeny
barevně): Při napájení 3V a maximální úrovni jasu bílých
SMD LED byl odběr 10mA a osvětlení 3,33lx.
Plošný spoj a schéma
Popis elektroniky: Jas LED diod je řízen pomocí PWM, které je generované na výstupech ATtiny25 (PB0 a PB1). Tento signál pak spíná proud do LED diod pomocí N-FET tranzistorů. Tlačítky se volí požadovaný režim - viz software. Pojistka a transil slouží jen jako ochrana před přepólováním
napájecího napětí. Jejich typ a hodnota záleží na použitém
zdroji napětí. Pro napájení je možné použít libovolný zdroj s napětím 3 až 5,5V. Plánováno bylo: V případě použití 4 x 1.5V
baterie, je třeba
snížit napětí do ATtiny pomocí sériově zapojené diody (D1) na
vývodu Vcc.
Podle velikosti maximálního možného napájecího napětí a podle typu a počtu použitých LED diod je třeba zvolit správnou hodnotu sériových odporů R1 a R3. Plošky pro připojení paralelních R1' a R3' byly použity jen pro vývoj a testování jasu při různých hodnotách odporů. Při tvorbě plošného spoje jsem přehlédl jeden nedostatek. Připravil jsem prostor pro 3mm THT LED. Když jsem pak sháněl LED v obchodech, ukázalo se, že 5mm LED mají ještě trochu lepší parametry, než 3mm. Problém je ale v tom, že se tam všechny 5mm LED nevejdou. Při použití 3ks červených a 2 ks bílých LED je třeba bílým LEDkám trochu naohybat nožičky.
Hodnoty a typy součástek použité v prototypech:
Plošný spoj jsem si nechal vyrobit také u Dirty Boards Podklady pro Eagle : headlamp_v11-3.brd
Software Update 2.4.2016 Po prvním ostrém vyzkoušení čelovky v terénu se
ukázalo, že některé funkce je třeba ještě trochu doladit.
GitHub: https://github.com/astromik/celovka Seznam změn verze 12 proti verzi 11: Tlačítko RED získalo dvě nové funkce:
Mechanika Celou čelovku je možné rozdělit na 3 části: - zdroj napájení (akumulátory nebo baterie) Ovládací modul s tlačítky a LED diody jsou na společné desce, ale plošný spoj je navržen tak, že je možné tuto desku jednoduše rozříznout a LED panel oddělit.
LED diody je třeba kvůli správnému zamíření světla
připevnit na hlavu tak, aby s nimi bylo možné naklánět nahoru a
dolu.
Plánoval jsem, že čelovka by mohla pracovat v těchto mechanických uspořádáních: 1) Ovládací panel s LED diodami a baterie společně v nějaké krabičce na čele. Tato varianta má nevýhodu v tom, že na čele bude poměrně velká hmotnost. Výhoda je, že je všechno pohromadě v jedné krabičce. 2) Ovládací panel s LED diodami na čele, baterie připevněná vzadu na hlavě. Je to trochu upravená předchozí varianta, kdy se hmotnost baterií přenese z čela dozadu. 3) Ovládací panel s LED na čele a baterie v kapse. Nevýhoda je v tom, že k hlavě v tomto případě povede dvoužilový kablík od baterie, který může někdy překážet 4) Ovládací panel a baterie ve společné krabičce připevněné na ruce, oddělený LED panel na čele. Stejně jako u předchozí verze, i tady může být
trochu problém s kablíkem (3-žilovým) mezi ovládacím panelem a LED
panelem. Pro vlastní uchycení plošňáku (nebo krabičky) na hlavu jsem plánoval použít gumy z běžně dostupných vietnamských čelovek:
UPDATE 18.3.2016
Po vyzkoušení různých druhů tlačítek jsem nakonec
zvolil tlačítka ze staré klávesnice.
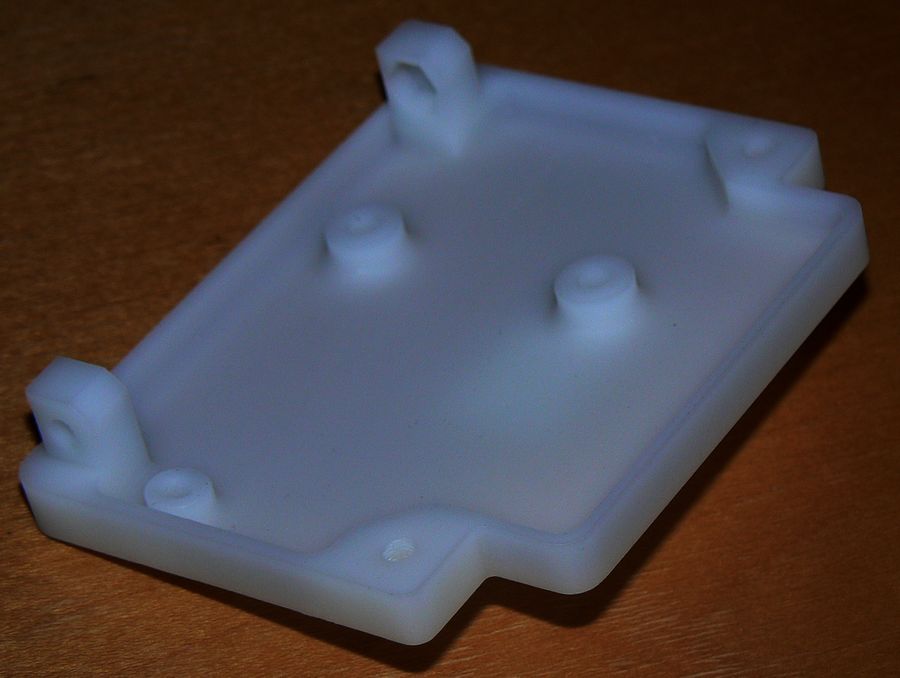
Krabičku jsem si nechal vyrobit pomocí 3D tisku. Tady jsou nějaké obrázky:
|





























{kind=link}