 Náhrada originálního tlačítkového ovladače k montáži HEQ5 / HEQ6 za verzi s joystickem. U originálního ovladače bylo nutné měnit rychlost přepínáním přepínače. V nové verzi stačí ke změně rychlosti více, nebo méně naklonit joystick v požadovaném směru. Ve verzi s joystickem jsou k dispozici pouze 2 rychlosti (2x a 16x). Originální ovladač měl i rychlost 8x, ale tu jsem vůbec nepoužíval. Přepínač "Sever / Jih" zůstal zachován jen jako propojovací pin uvnitř krabičky. Tento přepínač sloužil zároveň k vypínání napájení pro montáž, ale protože vypínání napájení řeším pomocí extra rozvaděče, nebylo nutné ten vypínač vyvést ještě na krabičku. V každém případě jsou na plošném spoji připraveny piny pro připojení tohoto "centrálního" vypínače. Přepínač na prohození tlačítek "Dec+" a "Dec-" (v původním ovladači to byl přepínač "Dec-REV") je také umístěn uvnitř krabičky. Ani tenhle přepínač jsem na originálním ovladači snad nikdy nepoužil, tak jsem nepovažoval za důležité ho umisťovat na nějaké dostupnější místo. Po přepnutí vnitřního přepínače je nutné provést RESET. Funkce prohození tlačítek "RA+" a "RA-" (v původním ovladači to byl přepínač "RA-REV") se provádí delším podržením tlačítka na joysticku (na 1 sekundu). Prohození je signalizováno krátkým zeleným bliknutím LED. Dvoubarevná LED na krabičce signalizuje aktuální stav:
Program umožňuje ještě kalibraci nulové polohy joysticku. Když je při zapnutí napájení nasazená propojka na kolíkách označených "NULA", dojde k zaznamenání aktuální polohy joysticku. Tato poloha je pak vyhodnocována jako joystick bez vychýlení. Po uložení polohy se LED rozbliká (zelená / červená). Při dalším resetu (tentokrát už bez nasazené čepičky) se nově nastavená nulová poloha načte. Odposlech signálů z původního
ovladače
Originální ovladač komunikuje s montáží pomocí nějaké jednosměrné sériové komunikace. Komunikaci se mi podařilo odposlechnout a většinu částí jsem dokázal rozkódovat. Některé části mi ale stále nedávají smysl (možná to jsou nějaké kontrolní součty). Program proto jen replikuje odposlechnuté průběhy originálního ovladače při různých stisknutých tlačítkách. Grafy průběhů originálního ovladače při všech variantách stisknutých tlačítek a při různých rychlostech. Význam popisků je následující:
Program
Program pro Arduino Mini PRO: ovladac.ino Doporučené nastavení FUSE: Low: 0xFF; High: 0xD7; Extend: 0xFF (žádný bootloader, nemazat EEPROM, pomalý náběh napájení při krystalu 16MHz, vypnutý BROWN_OUT detektor) Pro naprogramování Arduina je na spodní straně připravený nahrávací ISP konektor 2x3 piny. Schéma a plošný spoj
První verze plošného spoje (na fotografii) obsahovala jednu chybu v napájecí části (bylo nutné provést jedno přeškrábnutí cesty a její přepojení pomocí drátu). Druhá verze sice není vyzkoušená, ale ta napájecí chyba už je tam opravena:  ovladac.sch ovladac.brd Připojení
kabelu ovladače
K dalekohledu je ovladač připojen krouceným telefonním kabelem.Zapojení koncovky RJ12 musí odpovídat originálnímu ovladači: 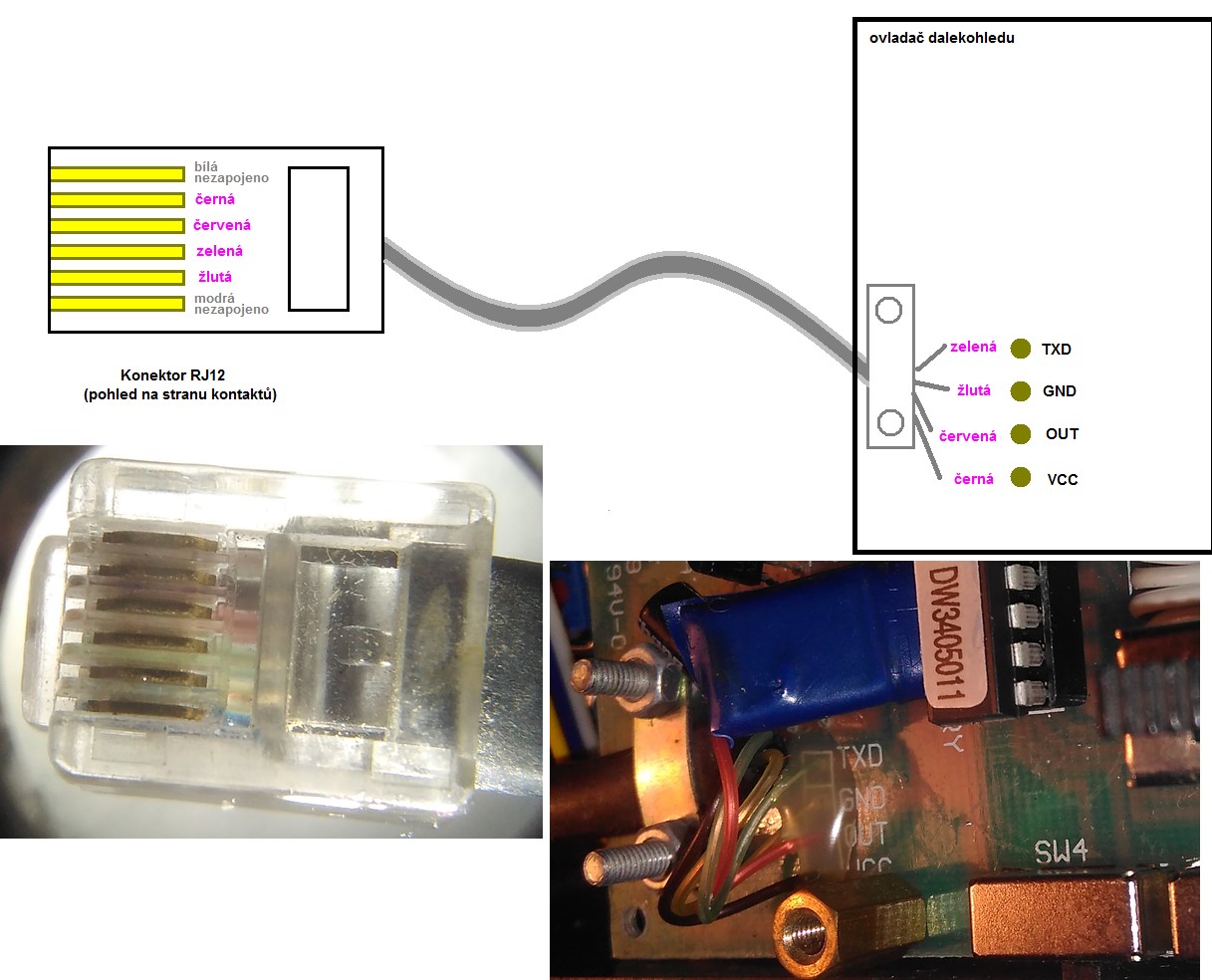 Mechanika
Plošňák byl navržen tak, aby se vešel do elektromontážní krabičky "Mini25". Prodejci: elektroskokan.cz, VPcentrum , možná by šla použít i tahle krabička z TME Aby se Arduino vešlo do krabičky na šířku, bylo nutné ho z jedné strany zabrousit do roviny s hlavním plošným spojem. V této části Arduina se nacházely pouze nevyužité piny Tx, Rx, DTR, Vcc a GND. Plošňák je pomocí 4 distančních sloupků (M3x15) přišroubovaný k víku krabičky, skrz které prochází páka joysticku a dvoubarevná LED.  Ukázkové video
|
||||||||||||||||||||||||||||||||




